Visibility3D szimulációs program a korlátozott látási viszonyok modellezésére¹
Bevezetés
Az emberi látás kulcsfontosságú érzékelési mód, amely az információk legnagyobb részét biztosítja és alapvető szerepet játszik a közúti közlekedés során a tájékozódásunkban. Az emberi látás egy rendkívül összetett folyamat, melyben a szembe érkező fényt a retina az agyi központok segítségével feldolgozza. Ez a komplex rendszer teszi lehetővé az ember számára a világ háromdimenziós, színes észlelését, valamint a gyors és adaptív reakciót a környezet változásaira.
A korlátozott látási viszonyok tágabb értelmezés szerint minden olyan körülményt magukban foglalnak, amelyek korlátozzák a látásunkat, így a levegőben folyékony vagy szilárd részecskék jelenlétét, vagy a fényviszonyok megváltozását (pl. szürkület). Fontos kiemelni, hogy ezen viszonyok általában ideiglenesek, és megnehezítik az ilyen körülmények között bekövetkező közlekedési balesetek vizsgálatát.
A korlátozott látási viszonyok között történt közlekedési balesetek igazságügyi szakértői vizsgálata során a szakértő a gyalogos és az akadály észlelhetőségét vizsgálja. Ezen észlelhetőség megítélésére gyakran a bizonyítási kísérlet bizonyul az egyetlen eszköznek, melynek eredménye jelentős mértékben függ a résztvevők szubjektív észlelésétől.
A közúti közlekedési balesetek objektív vizsgálati igénye ösztönözte az igazságügyi szakértőket arra, hogy az észlelhetőséget számítógépes programok segítségével vizsgálják. A korlátozott látási viszonyok elemzésére szolgáló Észlelhetőség 1.0. és Dohladnost programokat az 1990-es években fejlesztették, az azóta eltelt idő alatt a számítástechnika, különösen a számítógépes grafika terén bekövetkezett jelentős fejlődés új lehetőségeket nyitott a fejlesztők előtt.
A számítógépes grafika jelenlegi lehetőségeit kihasználva született meg a szerző által fejlesztett Visibility3D szimulációs program, amellyel modellezhetők a korlátozott látási viszonyok, lehetővé téve az ezen körülmények között bekövetkező balesetek objektív vizsgálatát.
Az NSZKK igazságügyi gépjármű szakértői a programot már aktívan használják, és visszajelzéseik segítik a folyamatos fejlesztést, ezzel biztosítva, hogy a szoftver optimálisan alkalmazkodjon a felhasználói igényekhez.
Háttér
A tárgyak észlelése az objektum és a háttér közötti fénysűrűség-különbségen és a szem érzékelési küszöbértékén alapul, ahol az észleléshez szükséges feltétel, hogy a fénysűrűség-különbség meghaladja a szem küszöbértékét. Ez utóbbi számos tényezőtől függ, beleértve az észlelő személy korát, a háttér fénysűrűségét, valamint az észlelendő tárgy méreteit is.
A jelenlegi számítógépes programokban alkalmazott szemérzékenységi küszöb matematikai modelljét Werner Adrian alkotta meg.2 A modell figyelembe veszi a negatív/pozitív kontrasztot, a megfigyelési időt, az észlelendő tárgy nagyságát, a háttér fénysűrűségét és az észlelő korát is. A szem érzékenységi küszöböt befolyásoló tényezők nagy száma sejteti, hogy az emberi látás modellezése kihívásokat jelentő feladat.
A szemérzékenységi küszöb csak egyike az észlelést alapvetően befolyásoló mennyiségeknek, emellett kiemelt jelentősége van a háttér és az akadály közötti fénysűrűség-különbségnek is.
A fénysűrűség az a fizikai mennyiség, amely kifejezi az adott területen vagy térbeli pontban eloszló fény mennyiségét, egyszerűsítve azt, hogy milyen fényes egy terület. A fénysűrűség mérése ún. fénysűrűségmérő kamerákkal történhet, melyek költségigényességük miatt nem váltak általánosan elterjedtté az igazságügyi szakértői gyakorlatban.
A fénysűrűség-mérés egyik lehetséges alternatívája a megvilágítás-mérés, amennyiben ismert a mérendő felület fényvisszaverési együtthatója, mivel a fénysűrűség a megvilágítás és a fényvisszaverési együttható szorzatából adódik. A megvilágításmérők kedvező áruk miatt, költséghatékony alternatívát jelentenek a fénysűrűség meghatározásához. A megvilágítás az a fizikai mennyiség, ami azt fejezi ki, hogy egy adott felületre vagy térbe irányuló fényáram milyen intenzitással érkezik, egyszerűsítve azt, hogy mennyi fény jut el egy adott területre.
A fényszóró modellezés alapját, mind a korábbi szoftverek, mind a Visibility3D szimulációs szoftver esetében a járművek fényszóróinak adott felületen mérhető megvilágítási értékei képezik. A fényszórók fotometriai adatait a jármű előtt ismert távolságra elhelyezett felületen (mérőernyő) egy 10 x 10 cm-es háló csúcspontjaiban mérik, ezen mérési eredmények szolgálnak a későbbi számítások alapjául.
A járművek fényszóróinak fotometriai adatgyűjtése időigényes feladat, azonban a következő fejezetekben egy olyan új, költséghatékony és gyors módszert mutatok be, amely adott körülmények mellett hatékonyan kiváltja a hagyományos mérési folyamatot.
A Kemény Lajos által kidolgozott számítási módszerrel3 a fényszóró fotometria adatai alapján objektív módon határozható meg a vizsgálandó akadály és a háttér fénysűrűség-különbsége, amely összevethető a szemérzékenységi küszöb értékével, lehetővé téve az észlelhetőség objektív értékelését.
A Visibility3D szimulációs program a fényszóró grafikai megjelenítéséhez felhasználja a fotometriai adatokat és a Kemény Lajos által kifejlesztett számítási módszert, ami biztosítja, hogy a fényszóró modellezése ne csak vizuálisan-realisztikusan, hanem a tudományos összefüggéseket is figyelembe véve történjen.
A Visibility3D szimulációs program a környezeti megvilágítás és a közvilágítás modellezésére is lehetőséget ad, ezekre az alábbiakban kitérek.
A fényforrások modellezése
Környezeti megvilágítás modellezése
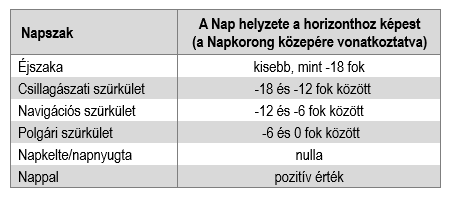
Nappali fényviszonyok között a környezeti megvilágítás értéke főként attól függ, hogy a Nap hol helyezkedik el az égbolton a megfigyelő szemszögéből. Ezt a Nap horizonthoz viszonyított helyzete segítségével jellemezhetjük, ahol a horizont alatt az a vonal értendő, ahol az ég és föld érintkezni látszik egymással. A Nap horizonthoz viszonyított helyzete alapján definiáljuk a különböző napszakokat, melyeket az alábbi, 1. számú táblázat foglal össze.
- számú táblázat
A Visibility3D szimulációs programban a Nap helyzetének számítása csillagászati összefüggések4 alapján történik. Ezen számítások alapja a vizsgált hely hosszúsági és szélességi koordinátái és a helyi idő szerinti időpont (év, hónap, nap, óra, perc). A fentiek mellett a programon belül lehetőség van a Hold helyzetének és fázisának modellezésére is. A számítások validálása során vizsgáltam, hogy adott bemenő adatok mellett a szoftver által számolt értékek egyeznek-e egyéb elfogadott források5 által számított értékekkel.
Közlekedési szempontból, ha a Nap több mint 6 fokkal van a horizont alatt, éjszakai fényviszonyokról beszélhetünk. Amikor a Nap -6 és 0 fok között helyezkedik el a horizont alatt, a fényviszonyok gyorsan változnak, ez jelentős kihívást jelent az időigényes bizonyítási kísérletek végrehajtásában. Ezek a korlátok hatékonyan kezelhetők a Visibility3D szimulációs szoftver segítségével.
Közvilágítás modellezése
A Visibility3D szimulációs programban a közvilágítás modellezése a közvilágítási fényforrás fotometriai adatai alapján történik. Ezek az adatok két forrásból származhatnak: az egyik csoportot a szakértői kollektíva által végzett mérések alkotják, míg a másik csoportot az ún. IES (Illuminating Engineering Society, USA) adatok képezik.
A mérések során a közvilágítási lámpatest alatt 1 x 1 méteres mérőháló csomópontjaiban mérték a megvilágítási értéket, ezek alapján történik a grafikus megjelenítés.
Az IES-adatok nyilvánosan elérhető adatbázisokból származnak, amelyek a fényforrás fotometriai adatait tartalmazzák, így a fény térbeli eloszlását is.
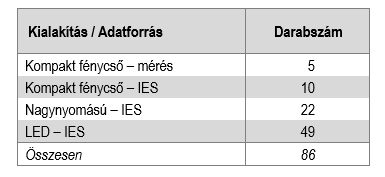
Bár az utóbbi években egyre elterjedtebbé vált a LED-es fényforrások használata a közvilágítások terén, még mindig széles körben alkalmaznak kompakt fénycsöves, illetve nagynyomású nátriumlámpákat is.
A 2. számú táblázat a programban elérhető közvilágítási fényforrások darabszámát foglalja össze kialakításuk és az adatok forrása szerint.
- számú táblázat
Jármű fényszóró modellezése
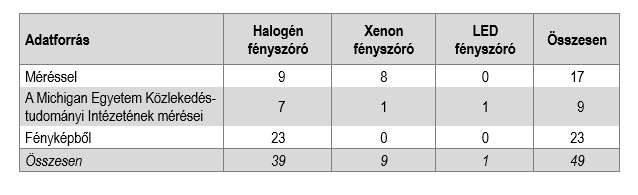
A Visibility3D szimulációs programban a fényszórók modellezése a fényszóró fotometriai adatai alapján történik. Ezek az adatok három különböző forrásból származhatnak: az első csoportot a szakértői kollektíva által végzett mérések képezik, a második csoportot a Michigani Egyetem Közlekedéstudományi Intézetének6 fotometriai mérései alkotják, míg a harmadik csoportot a fényképek alapján meghatározott fotometriai adatok szolgáltatják.
A mindennapi közlekedés során gyakran előfordulnak olyan helyzetek, amikor az egyik fényszóró nem működik, vagy a két fényszóró beállítása eltérő. A fent részletezettek miatt a jobb és bal oldali fényszóró modellezése a programban külön-külön történik.
Az adatok forrásától függetlenül a fényszóró-modellezés alapja az alábbiak szerint részletezhető: a fotometriai adatokat a grafikus megjelenítésért felelős shader7 bemenő adataként funkcionáló textúra tartalmazza. A shader a fotometriai adatok és a távolságtörvény alapján jeleníti meg a tér tetszőleges pontjának fényszóró általi megvilágítását.
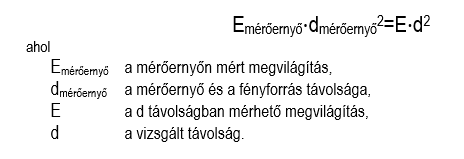
A fent részletezett módszer alapja, hogy a fotometriai adatokat tartalmazó textúra a fényszórótól adott távolságra mérhető megvilágítási értékeket foglalja magába, melyből adott távolságra található térbeli pontban a megvilágítási érték a távolságtörvény alapján határozható meg. A távolságtörvény alapján a megvilágítási érték és a távolság négyzete állandó, azaz a távolság megduplázásával a megvilágítási érték negyedére csökken, ezt az összefüggést mutatja az 1. képlet.
- képlet
A 3. számú táblázat a programban elérhető tompított fényszórók darabszámát foglalja össze kialakításuk és az adatok forrása szerint.8
A fentieken túl 22 jármű esetében távolsági fényszóróra vonatkozóan is rendelkezésre állnak fotometriai adatok, melyből 2 jármű esetében az adatok forrása a Michigan Egyetem Közlekedéstudományi Intézetének mérése, míg a többi esetben fénykép.
- számú táblázat
A fényszóró fotometriai adatainak mérése
A fényszóró fotometriai adatainak mérése során a jármű előtt adott távolságra elhelyezett függőleges felületen, egy 10 x 10 cm-es mérőháló csúcspontjaiban mérik a megvilágítási értéket. A fotometriai adatok fent részletezett módon történő rögzítése időigényes feladat, emellett a fényszóró felületre vetített képét 10 centiméteres pontossággal adják meg, így a fényeloszlás csak közelítőleg határozható meg. A mérési módszer ezen hiányosságait orvosolhatja a mérések fényképpel való helyettesítése, amit a következő alfejezetben részletezek.
A fényszóró fotometriai adatainak meghatározása fényképezőgép segítségével
A digitális fényképezőgépek szenzorai a szenzorra eső fénnyel (fénysűrűséggel) arányos jelet generálnak, ezek képezik a digitális fénykép alapját. A digitális kép legkisebb egysége a pixel (képpont), amelyet a képen belüli helye és a színe jellemez. A digitális fényképek feldolgozásához különböző színrendszereket használnak, köztük az RGB színrendszert, ahol a színt piros (Red), zöld (Green), és kék (Blue) komponensre bontják. Az adott képpont színét a pixelértékkel fejezzük ki, amelyet az RGB-komponensekből a 2. számú képlet szerint számolhatunk ki.
- képlet
Ez a képlet figyelembe veszi, hogy az emberi szem eltérő érzékenységgel reagál a piros, a zöld és a kék színekre. A digitális fényképezőgépek OECF- (Opto-electronic Conversion Function) görbéi a szenzorra eső fény és a pixelérték közötti kapcsolatot mutatják be. Az OECF-görbéket illetően kiemelendő, hogy ezek egy konkrét fényképezőgép-beállításhoz kapcsolódnak, azonban a különböző beállításokhoz tartozó görbék kölcsönös összefüggésben állnak egymással.
A fényforrás által kibocsátott fény megvilágítási értéke arányos a felületre beeső fénnyel. A megvilágítás fényképezőgéppel akkor mérhető, ha a fényképezőgépbe jutó fény mennyisége arányos lesz a fényképezett felületre eső fény mennyiségével, ami egyenletesen diffúz felülettel érhető el. Az egyenletesen diffúz felület olyan felület, amely a beeső fényt azonos intenzitással veri vissza minden irányba, így a beeső fény szóródik, és nem tükröződik irányítottan vagy koncentráltan egy irányba.
A korábban ismertetett elméleti összefüggések képezik a fényszórók fotometriai adatainak gyűjtésére szolgáló új módszer alapjait, ennek gyakorlati alkalmazásához az alábbi feltételek szükségesek:
- egységesen diffúz felület, amelyre a fényszóró fénye vetül; valamint
- a kalibrációs görbe, amely kapcsolatot teremt a megvilágítási érték és a pixelérték között.
A fényszóró fotometriai adatainak gyűjtése a fényképezőgéppel a következő módszerrel történik: a fényszóró elé egyenletesen diffúz vetítővásznat helyeznek, erre vetül a fényszóró fénye. A vetítővásznat a kalibrált fényképezőgép bizonyos beállításokkal lefényképezi, majd a szoftver a kalibrációs görbe alapján feldolgozza (ábra).
Ábra: Kalibrációs görbe
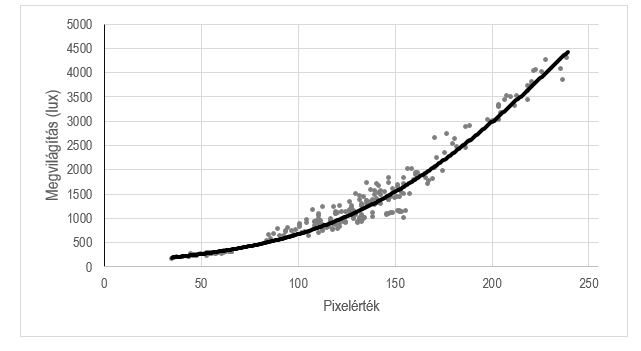
Ez a módszer előnyösebb a korábbi eljárásokhoz képest, mivel gyors, költséghatékony és nagyobb pontossággal gyűjti a fényszóró fotometriai adatait. Emellett lehetőséget nyújt olyan tényezők vizsgálatára, amelyeket a korábbi módszerekkel nehéz volt megvalósítani, például a szennyeződések hatásának elemzését a vetített képen.
A Visibility3D funkciói és képességei
A Visibility3D szimulációs program alapvető célja, hogy lehetővé tegye a felhasználók számára a különböző fényviszonyok közötti észlelhetőség vizsgálatát realisztikus grafikai megoldásokkal, mindezt a korábban tárgyalt csillagászati, matematikai és fizikai összefüggések széles körű alkalmazásával. A szoftver jelenlegi változata a hangsúlyt a grafikus megjelenítésre helyezi, validálása kísérletekkel történt. Ezen kísérletek során először méréssel meghatározták a jármű fényszóróinak fotometriai adatait, majd fényképeket készítettek a teljesen fehér, illetve fekete ruházatú gyalogosokról, akik a jármű előtt 10-100 méter közötti távolságban álltak. A grafikus megjelenítés validációjakor a kísérleti fényképfelvételt összevetették a program által generált grafikus megjelenítéssel.
A Visibility3D szimulációs program jelenlegi verziójával a gyalogosok észlelhetősége vizsgálható, ehhez a felhasználónak adatokat kell megadni, melyek az alábbi fő csoportokba oszthatók:
- Járművel kapcsolatos adatok
- Gyalogossal kapcsolatos adatok
- Környezettel kapcsolatos adatok
- Egyéb megjelenítéssel kapcsolatos adatok.
Az adatok megadása minden esetben a program egyszerűen kezelhető felületein történik, és az adatok módosításának hatása azonnal láthatóvá válik. Az új elemek azok képernyőre húzásával (drag and drop) tölthetők be, így gyorsan és felhasználóbarát módon lehet a vizsgálandó környezetet kialakítani.
A járművel kapcsolatos adatok
A járművek betöltése könnyedén elvégezhető a drag-and-drop-technikával, ahol a felhasználó a kívánt modellt egyszerűen választhatja ki a rendelkezésre álló listából. A járművek mozgását a sebesség és a haladási irány, vagy a PC-CrashTM-ből9 lementett mozgásadatok megadásával lehet definiálni. Az észlelhetőség szempontjából kiemelten fontosak a fényszórók beállításai, amelyek a jobb és a bal oldalon külön-külön definiálhatók. A fényszórókkal kapcsolatosan azok helyzetére, illetve a modellezendő fényforrásra vonatkozóan kell adatokat megadni. A fényszórók gyors kiválasztását szűrők támogatják, melyek segítségével műszaki kialakítás alapján lehet keresni az adatbankban. A kiválasztott fényszóró képe mellett megjelennek a főbb műszaki paraméterek is, mint az adatok forrása, a maximális megvilágítási érték. Emellett a fényszórók dőlési szöge, hatásfoka és színhőmérséklete is testre szabható.
A gyalogossal kapcsolatos adatok
A gyalogos modellekkel kapcsolatos adatok megadása hasonlóan történik, mint a járművek esetében: a gyalogosok betöltése egy modell-listából való választással és a képernyőre húzással. A rendelkezésre álló modelleket nemcsak nemük szerint lehet csoportosítani, hanem különböző mértékű testreszabhatósággal is rendelkeznek. Mind a női, mind a férfi modellek között megtalálható egy teljesen testre szabható változat, amely maximális szabadságot biztosít a gyalogos modell személyre szabásához.
A legteljesebb testreszabhatóságú modellek esetében a felhasználó módosíthatja a haj színét, a bőr tónusát, a felsőruházat jellegét (pl. ujjatlan, hosszú ujjú), az alsóruházat jellegét (pl. szoknya, nadrág), cipő stílusát, kiegészítők (pl. kesztyű, sapka) használatát. A testre szabható ruházat esetében a felhasználó a ruhadarab anyagát és színét is szabadon változtathatja. A kevésbé módosítható modellek esetében a ruházat anyaga és színe változtatható.
A gyalogosok mozgását a sebesség és a haladási irány, vagy a PC-CrashTM-ből lementett mozgásadatok megadásával lehet definiálni. Ezen kívül a gyalogos testhelyzete is választható, ez jelenleg álló vagy fekvő lehet. A gyalogosok mozgása animált, ami hozzájárul az élethű modellezéshez. A szoftveren belüli animációk a modell nemétől és a megadott sebességtől függően változnak, például gyalogló vagy futó mozgás jelenhet meg.
A környezettel kapcsolatos adatok
A szoftver számos lehetőséget nyújt a szimulációs környezet részletes kialakítására, amelyek az alábbi fő kategóriákba sorolhatók:
- Háttér testre szabása: A háttér anyaga valós időben változtatható, a felhasználó 60 különböző anyag közül választhat. A nagy felbontású textúrák és a fizikai alapokon nyugvó renderelés (megjelenítés) hozzájárul az anyagok élethű megjelenítéséhez, ahol a fénnyel való kölcsönhatás a fizikai törvények figyelembevételével valósághűen kerül modellezésre.
- Az úttest és az útpadka kialakítása: Az úttest anyaga, a sávok száma, az útburkolati jelek jellege és színe szabadon módosítható. Az útpadka esetében még annak magassága is testre szabható.
- Növényzet és épületek megadása: Az úttest melletti területen növényzet és épületek hozhatók létre egyenként vagy automatizált módon (pl. erdősáv, házsor). Mind a növényzet, mind az épületek további csoportokba rendezhetők a lombozat színe vagy az épületek vakolatának állapota alapján.
- Közvilágítás testre szabása: A lámpatestek egyedileg vagy automatikusan generálhatók. Az automatikus közvilágítás alkalmazásával a program a felhasználó által meghatározott feltételeknek megfelelően hozza létre a lámpatesteket, melyek külön-külön módosíthatók. A közvilágítási lámpatestek egyedi kezelése lehetővé teszi annak vizsgálatát, ha a közvilágítási lámpatestek nem azonos módon működnek (pl. egy lámpa nem világít).
- Köd, homokvihar modellezése: A szoftver lehetőséget biztosít a köd és a homokvihar modellezésére, ahol a felhasználó paraméterek beállításával érheti el a kívánt látási viszonyt.
- A csapadék hatásának modellezése: A jelenlegi verzió lehetővé teszi a csapadék hatásának modellezését, így a felhasználó különböző paraméterek segítségével testre szabhatja az útburkolat, útpadka és háttér nedvességét, illetve hófedettségét.
- Matricák: Az ún. matricák segítségével a szimulált környezet még élethűbbé válik. Ezzel a módszerrel könnyedén adhatók különböző elemek az útfelülethez, mint például csatornafedelek, repedések vagy pocsolyák.
- A megjelenítéssel kapcsolatos egyéb beállítások: a modellezendő környezet változatosságából adódóan szükség lehet az alapbeállítások módosítására, így például a renderelési sorrend testreszabására, mely során a felhasználó a rajzelemek megjelenítésének sorrendjét definiálja.
A fent említett funkciókon túl a szoftver rendelkezik további értékes, tudományos alapokon nyugvó lehetőségekkel, amelyek befolyásolják a megjelenítést. Ezek közül az egyik a Nap helyzetének modellezése, ami hatással van a környezeti megvilágításra. Ahogy azt a korábbi szakaszokban részleteztem, a Nap helyzetének, a Hold helyzetének és fázisának meghatározása a vizsgálandó hely koordinátái és az adott időpont megadásával történik. Ezek alapján a program kiszámolja a csillagászati, a navigációs és a polgári szürkület kezdetét és végét, valamint a napkelte és a napnyugta időpontját.
Az éjszakai látás modellezése
Az emberi látórendszer az információkat a retinán található csapok és pálcikák segítségével dolgozza fel. A csapok a színlátásért felelősek nappali fényviszonyok között, míg éjszaka a pálcikák játszanak kiemelt szerepet a kontraszt érzékelésében. Éjszakai körülmények között a színlátás lényegesen csökken, és a látás hangsúlya inkább a kontraszt érzékelésén van. Az éjszakai és nappali látás mellett elkülöníthető a szürkületi, ún. mezopos látás, ahol a színlátás intenzitása csökken a fent említett módon.
A program a Satoshi Shioiri és Hirohisa Yaguchi10 által kidolgozott színmodellt használja a mezopos látás modellezésére, amelynek bemenő paramétere a felhasználó által megadott megvilágítási érték.
A program korlátai és a jövőbeli fejlesztések
A szoftver fejlesztésének alapvető célja a csillagászati, matematikai és fizikai összefüggéseken alapuló élethű fényviszonyok modellezése volt. Azonban a változatos környezet és más tényezők – mint például a teljesítményigény – bizonyos korlátokat támasztottak a kivitelezés során. A jelenlegi verzióban nem valósult meg a fényszóró árnyékának, valamint a köddel való kölcsönhatásának a modellezése. A gyalogosok által viselt láthatósági mellény észlelhetősége kísérleti fázisban van, jelenleg még nem került validálásra.
Bár a program jelenlegi verziója korlátlan számú környezet kialakítását teszi lehetővé, a jövőbeli fejlesztések között szerepel a modellek listájának bővítése, a bonyolult vonalvezetésű utak modellezésének lehetősége, a járművek fényszóró-adatbázisának folyamatos bővítése, valamint a fényszóró árnyékának és a köddel való kölcsönhatásának a kalibrálása. Mindezek mellett tervezett a kerékpár- és motorkerékpár-mozgások modellezése is.
Összefoglalás
A cikkben részletesen kifejtettem a Visibility3D szoftver fejlesztése során alkalmazott csillagászati, matematikai és fizikai összefüggéseket, valamint az azokon alapuló modellezési eljárásokat. Kiemelt hangsúlyt helyeztem a különböző fényforrások modellezésének bemutatására és a fotometriai adatok gyűjtésének lehetőségeire. Bemutattam a fényszórók fotometriai adatgyűjtésének új, gyors és költséghatékony módszerét, amely nagyobb pontosságot biztosít. A modellezés alapjai mellett részletesen áttekintettem a program főbb funkcióit, valamint a szoftver korlátait és a jövőbeli fejlesztési irányokat.
A Visibility3D szoftver alkalmazásával az igazságügyi szakértők objektív módon vizsgálhatják a korlátozott látási viszonyok között bekövetkező baleseteket, így különösen a gyalogosok észlelhetőségét.
A számítások és a grafikus megjelenítés variálásával, a színlátás modellezésével és a grafikus megjelenítéshez használt módszerekkel kapcsolatosan a www.visibility3d.com oldalon található bővebb információ.
Décsy Gabriella, főtanácsos intézetvezető, igazságügyi gépjármű-közlekedési műszaki és közúti közlekedésbiztonsági műszaki szakértő, NSZKK Kecskeméti Intézet
- A szerző köszönetet mond a szakértő kollégáknak (Laurinyecz János, Kiss Roland, Tangl László, Laczkó Péter, Tóth András) a fénytani mérésekben való közreműködésükért, a Hajdrik és Mikó családnak a fejlesztés kezdete óta eltelt évek alatti kitartó támogatásukért.
- Werner Adrian: Visibility of targets. In: Visibility criteria for signs, signals, and roadway lighting. Transportation research record 1247. Transportation Research Board–National Research Council, Washington, 1989, pp. 39–45.
- Erről lásd Melegh Gábor: Gépjárműszakértés. Maróti Könyvkiadó, Budapest, 2004, 445–446. o.
- Paul Schlyter: Computing planetary positions – a tutorial with worked examples. http://www.stjarnhimlen.se/comp/tutorial.html
- Például: www.suncalc.org
- University of Michigan Transportation Research Institute, https://www.umtri.umich.edu/
- Shader: olyan számítógépes kód, ami a grafikus kártyán fut, a megjelenítésért felel.
- A 2023. decemberi állapotnak megfelelő adatok.
- http://www.dsd.at/index.php?option=com_content&view=article&id=512:pc-crash-englisch-3&catid=37&lang=en&Itemid=159
- JaeChul Shin – Naoki Matsuki – Hirohisa Yaguchi – Satoshi Shioiri: A Color Appearance Model Applicable in Mesopic Vision. Optical Review, 11(4), 2004, pp. 272–278. http://dx.doi.org/10.1007/s10043-004-0272-3